HMS Networks は、CAN ネットワークのロギング、ブリッジング、拡張のための多機能デバイス、Ixxat® CANnector を発表します。CAN@net NTおよびCANbridge NTと互換性があり、セットアップが簡単で複数のインターフェースを備えています。機能には、Linuxプラットフォーム、クラウド接続、および単純なドラッグアンドドロップ構成が含まれます。
CAN@netやCANbridge NTと同様に、CANnectorはスタンドアロンデバイスであるため、PCは必要ありません。汎用のCANnectorに加えて、3つの設定済みバージョンが用意されています。
CANnector Range – イーサネット経由で、または Ethernet 経由で PC に接続された CAN インターフェースとして、シンプルな CAN(FD)レンジ拡張が可能です。
CANnector Bridge – CAN(FD)ブリッジ/ゲートウェイ、フレームベースまたはシグナルベースで、あらゆるバスシステムに対応するオンライン浮動小数点データ操作などの機能を備えています。
CANnector Log – フレームまたは信号ベースの CAN(FD) データをロギングするための、トリガーおよびリングバッファ、および CAN(FD) でウェイクアップする低電力スリープモードを備えたデータロガー。
開梱して接続した後、3つのバージョンすべてを直接使用できます。ベースとなるハードウェアは同じで、ロード可能なコンフィグレーションによってCANnectorのさまざまな機能が提供されるため、すべてのCANnectorを再構成して、選択した機能を含めることができます。
CANnector は、パワフルな Linux プラットフォームにより、複雑なアプリケーションやデータ操作をデバイス上で直接実行できます。バス記述ファイルのサポートにより、信号レベルでの操作も可能です。
「Wake-up on CAN」とCAN バスのTX機能をオフにできるため、 このデバイスは 電力と安全性に敏感なアプリケーションで使用できます。
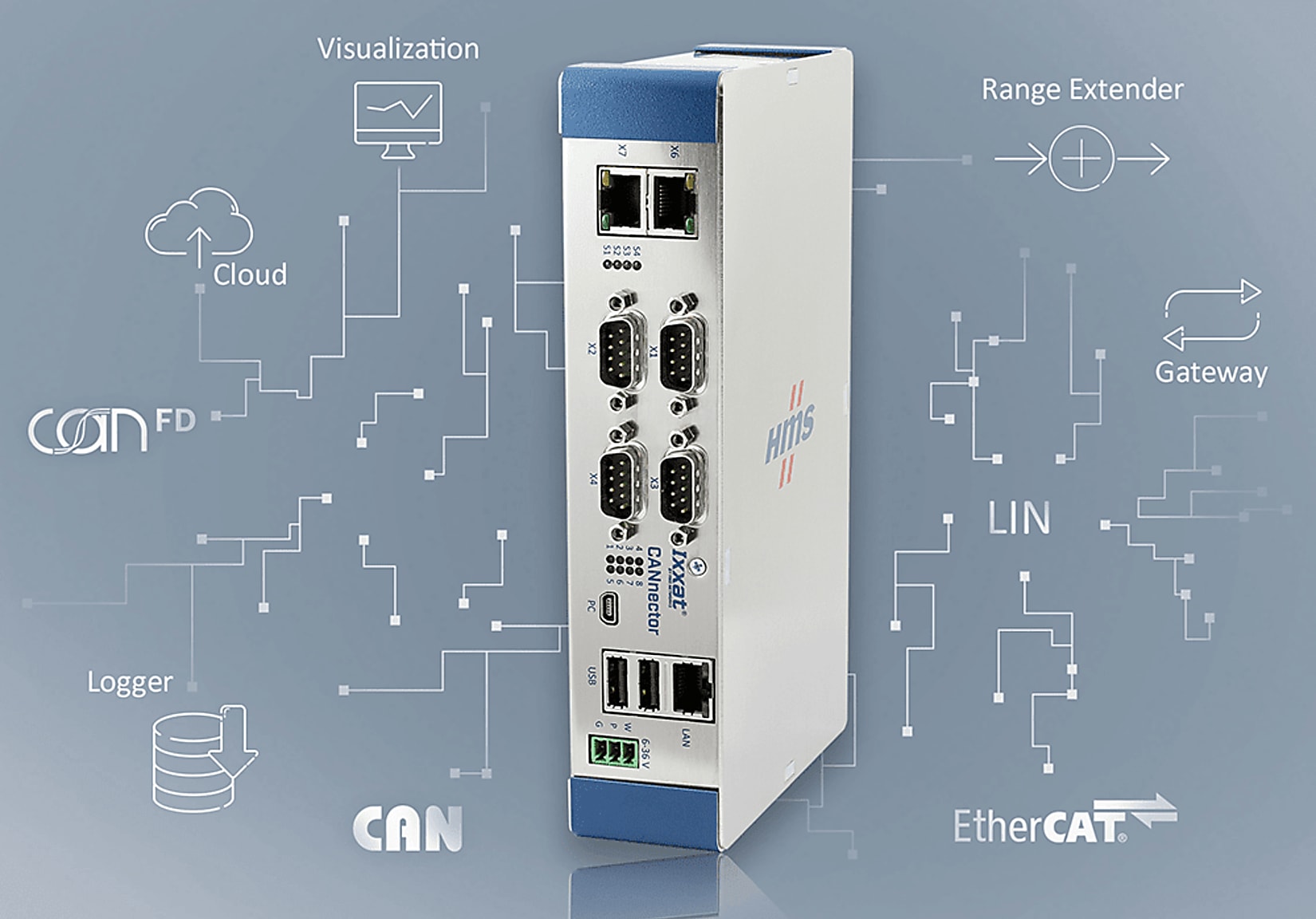
CANnectorにはさまざまなハードウェアバージョンがあり、それぞれ異なるのはサポートされているインターフェースの数だけです。インターフェースの最大数は、CAN(FD)×8、LIN(リン)×2、デジタルIO×2、EtherCATスレーブインターフェース×1、イーサネット、USBです。EtherCATスレーブインターフェースはHMSのAnybus® CompactCom技術を使用して実装されており、将来的には他の産業用Ethernetプロトコルにも対応可能です。Wi-FiやBluetoothなどのUSB拡張機能はオプションとして利用できます。
Ixxat CANnector には、モバイルデバイス(スマートフォンやタブレット)を使用した Wi-Fi 経由のライブデータの可視化やシミュレーション、OPC-UA や HMS Hub™ 経由のクラウド接続など、HMS 独自の産業用データ接続ソリューションなど、さまざまな追加機能が用意されています。
CANnector は EtherCAT スレーブインターフェースを使用して、CAN(FD)ベースのネットワークを産業用イーサネットネットワークや PLC に直接接続できます。
すべての機能は CANnector デバイス上で並列に実行できるため、モバイルデバイスでの CAN(FD) ブリッジングやデータ可視化など、データのロギングなどを並行して実行できます。
HMSは、ドラッグ&ドロップ方式でソースとターゲット間の「接続」を確立するCANnectorを簡単に設定できるWindowsツールを無償で提供しています。CAN(FD)バス記述は、オプションでインポートして設定することができます。標準機能 の範囲は、統合された開発およびデバッグ環境と、デバイス上で直接実行できる独自のCユーザーコードまたはMatlab/Simulinkモデルを使用して拡張できます。